СТАТИКА
Основные сведения для решения задач на равновесие
«Равновесие произвольной плоской системы сил»
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на
координатные оси x,y равнялись нулю, и сумма моментов всех сил относительно произвольной точки, лежащей в
плоскости действия данных сил также равнялась нулю:
\( \sum\limits_{k=1}^{N} F_{kx} = 0;
\sum\limits_{k=1}^{N} F_{ky} = 0;
\sum\limits_{k=1}^{N} m_{O}(\vec F_k ) = 0. \)
Для вычисления алгебраического момента силы относительно точки пользуются следующим определением: алгебраическим
моментом силы относительно точки называется величина, равная произведению модуля силы на кратчайшее
расстояние от точки до линии действия силы; момент силы относительно точки считается величиной положительной,
если сила стремится повернуть тело против хода часовой стрелки и отрицательным, если сила стремится повернуть
тело по ходу часовой стрелке; момент силы относительно точки не зависит от переноса силы вдоль линии ее
действия; момент силы относительно точки равен нулю, если линия действия силы пересекает точку, относительно которой вычисляется момент:
\( m_{O}(\vec F ) = \pm F \cdot h. \)
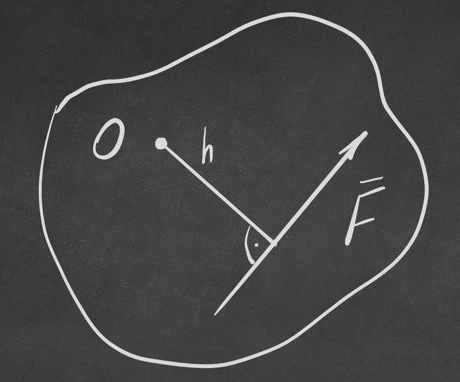
На приведенном ниже рисунке момент силы относительно точки считается положительным, так как сила стремится
повернуть тело против хода часовой стрелки и равен:
\( m_{O}(\vec F ) = F \cdot h. \)
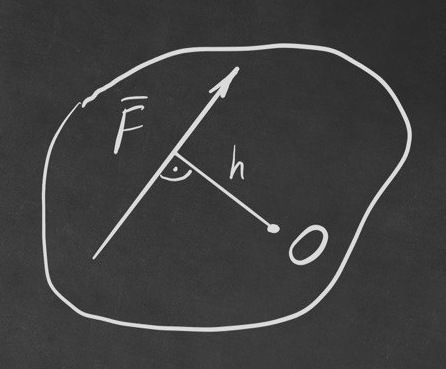
На приведенном ниже рисунке момент силы относительно точки считается отрицательным, так как сила стремится
повернуть тело по ходу часовой стрелки и равен:
\( m_{O}(\vec F ) = -F \cdot h. \)
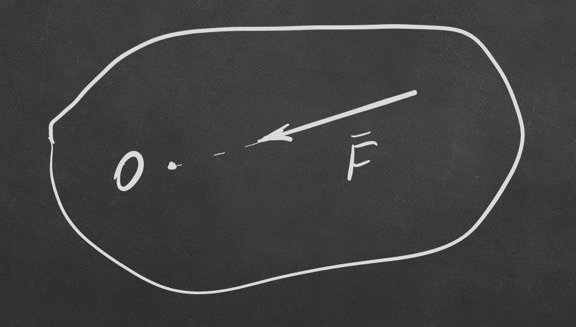
На приведенном ниже рисунке момент силы относительно точки считается равным нулю, так как линия действия силы пересекает точку, относительно которой вычисляется момент:
\( m_{O}(\vec F ) = F \cdot 0. \)
«Равновесие произвольной пространственной системы сил»
Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы сумма проекций всех
сил на оси координат x, y, z, а также сумма моментов всех сил относительно этих же осей равнялись нулю:
\( \sum\limits_{k=1}^{N} F_{kx} = 0;
\sum\limits_{k=1}^{N} F_{ky} = 0;
\sum\limits_{k=1}^{N} F_{kz} = 0; \)
\( \sum\limits_{k=1}^{N} m_{x}(\vec F_k ) = 0;
\sum\limits_{k=1}^{N} m_{y}(\vec F_k ) = 0;
\sum\limits_{k=1}^{N} m_{z}(\vec F_k ) = 0.
\)
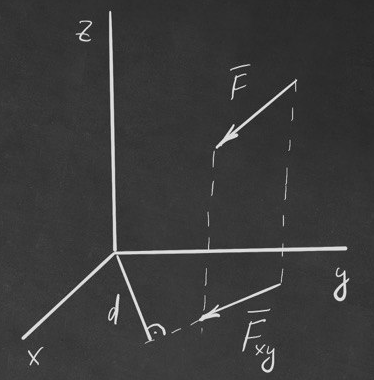
Моментом силы относительно оси называется алгебраическая величина момента проекции этой силы на плоскость,
перпендикулярную к данной оси, относительно точки пересечения этой плоскости с осью.
Момент силы относительно оси считается положительным, если наблюдатель, смотрящий с положительного направления оси,
видит поворот, совершаемый составляющей проекции силы на плоскость, происходящим против хода часовой стрелки. Момент силы относительно оси равен нулю, если линия действия силы параллельна оси или пересекает ее.
\( m_{z}(\vec F ) = \pm F_{xy} \cdot d. \)
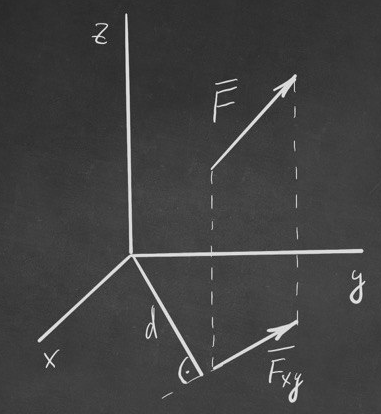
На приведенном ниже рисунке момент силы относительно оси считается положительным, так как сила стремится
повернуть тело против хода часовой стрелки и равен:
\( m_{z}(\vec F ) = F_{xy} \cdot d. \)
На приведенном ниже рисунке момент силы относительно оси считается отрицательным, так как сила стремится
повернуть тело по ходу часовой стрелки и равен:
\( m_{z}(\vec F ) = -F{xy} \cdot d. \)
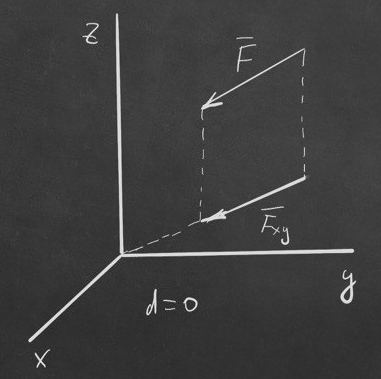
На приведенном ниже рисунке момент силы относительно оси считается равным нулю, так как линия действия силы
пересекает ось, относительно которой вычисляется момент:
\( m_{z}(\vec F ) = F_{xy} \cdot 0. \)
На приведенном ниже рисунке момент силы относительно оси считается равным нулю, так как линия действия силы
параллельна оси, относительно которой вычисляется момент:
\( m_{z}(\vec F ) = 0 \cdot d. \)
