Краткий пример по теме Теоремы о главном моменте количеств движения механической системы. Пример для самостоятельной работы и подготовки к контрольным мероприятиям. Пример может также использоваться для проверки подобных задач по данной теме путем комбинирования вводимых параметров. Для внесения изменений в пример необходимо ввести данные во все поля, доступные для ввода.
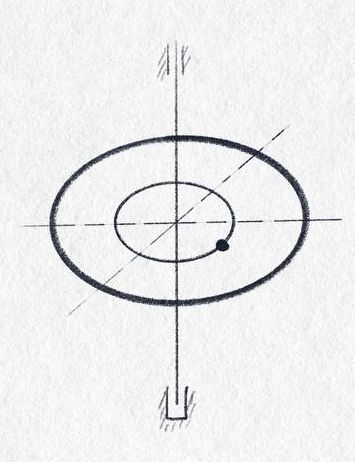
Горизонтальная платформа может свободно вращаться без трения вокруг вертикальной оси, проходящей через ее центр. По платформе, на постоянном расстоянии от оси вращения, равном \( r \), движется с постоянной относительной скоростью \( u \) материальная точки массой \( m_1 \). С какой угловой скоростью \( \omega \) будет при этом вращаться платформа вокруг оси, если ее массу \( m_2 \) можно считать равномерно распределенной по площади круга радиуса \( R \). В начальный момент платформа и точка были неподвижны, значение скорости зависит от времени и равно \( t \).
Решение
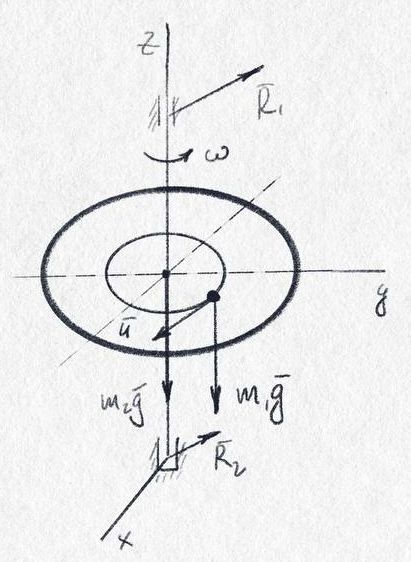
Предварительно для дальнейшего решения задачи необходимо согласно условию задачи составить расчетные схемы. Изобразим схематично механическую систему: платформу с находящейся на ней материальной точкой, а также оси координат.
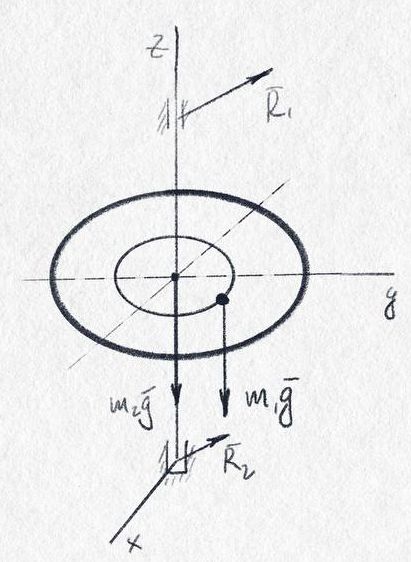
Покажем под действием каких сил находится механическая система. Изобразим возможные направления скоростей платформы и материальной точки.
На механическую систему действуют следующие силы: силы тяжести платформы и точки, а также силы реакции. Моменты
данных сил относительно оси вращения равны нулю, а следовательно, проекция главного момента количеств движения
рассматриваемой механической системы человека останется постоянной, т.е., имеет место закон
сохранения кинетического момента относительно оси вращения:
\( K_{z0}=K_z \).
В начальный момент платформа вместе с точкой неподвижны, тогда:
\( K_{z0}=0. \)
В текущий момент платформа начинает вращение, при движении по ней материальной точки, тогда:
\( K_{z}=I_z \omega + m_1 ( \omega r^2 + ur), \)
тогда:
\( 0=I_z \omega + m_1 ( \omega r^2 + ur), \)
откуда, с учетом \( I_z = \frac{m_2 R^2}{2} \):
\( \omega=-\frac{2 m_1 u r}{m_2 R^2 + 2 m_1 r^2}. \)
Построим график зависимости угловой скорости платформы от перемещения точки::

При построении графика использовались следующие значения::
\(m_1 = 2.0 \:кг \) , \(m_2= 4.0 \:кг\), \(\omega_0=0.0\: c^{-1}\), \(R=4.0\: м\), \(r=2.0 \:м\).
Горизонтальная платформа может свободно вращаться без трения вокруг вертикальной оси, проходящей через ее центр. По платформе, на постоянном расстоянии от оси вращения, равном \( r \), движется с постоянной относительной скоростью \( u \) материальная точки массой \( m_1 \). С какой угловой скоростью \( \omega \) будет при этом вращаться платформа вокруг оси, если ее массу \( m_2 \) можно считать равномерно распределенной по площади круга радиуса \( R \). В начальный момент платформа имела угловую скорость \( \omega_0 \), значение скорости зависит от времени и равно \( t \) а движение точки происходит в сторону вращения платформы.
Решение
Предварительно для дальнейшего решения задачи необходимо согласно условию задачи составить расчетные схемы. Изобразим схематично механическую систему: платформу с находящейся на ней материальной точкой, а также оси координат.
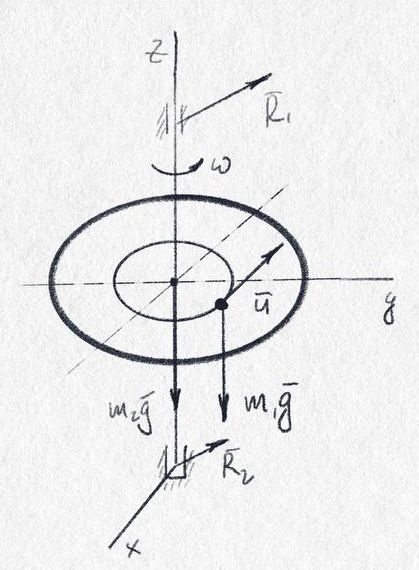
Покажем под действием каких сил находится механическая система. Изобразим возможные направления скоростей платформы и материальной точки.
На механическую систему действуют следующие силы: силы тяжести платформы и точки, а также силы реакции. Моменты
данных сил относительно оси вращения равны нулю, а следовательно, проекция главного момента количеств движения
рассматриваемой механической системы человека останется постоянной, т.е., имеет место закон
сохранения кинетического момента относительно оси вращения:
\( K_{z0}=K_z \).
В начальный момент платформа вместе с точкой вращаются с угловой скоростью \( \omega_0 \), тогда:
\( K_{z0}=I_z \omega_0 + m_1 \omega_0 r^2. \)
В текущий момент платформа продолжает вращение, при движении по ней материальной точки, тогда:
\( K_{z}=I_z \omega + m_1 ( \omega r^2 + ur), \)
тогда:
\( I_z \omega_0 + m_1 \omega_0 r^2=I_z \omega + m_1 ( \omega r^2 + ur), \)
откуда, с учетом \( I_z = \frac{m_2 R^2}{2} \):
\( \omega=\omega_0 - \frac{2 m_1 u r}{m_2 R^2 + 2 m_1 r^2}. \)
Построим график зависимости угловой скорости платформы от перемещения точки::

При построении графика использовались следующие значения::
\(m_1 = 4.0 \:кг \) , \(m_2= 8.0 \:кг\), \(\omega_0=4.0\: c^{-1}\), \(R=8.0\: м\), \(r=4.0 \:м\).
Горизонтальная платформа может свободно вращаться без трения вокруг вертикальной оси, проходящей через ее центр. По платформе, на постоянном расстоянии от оси вращения, равном \( r \), движется с постоянной относительной скоростью \( u \) материальная точки массой \( m_1 \). С какой угловой скоростью \( \omega \) будет при этом вращаться платформа вокруг оси, если ее массу \( m_2 \) можно считать равномерно распределенной по площади круга радиуса \( R \). В начальный момент платформа имела угловую скорость \( \omega_0 \), значение скорости зависит от времени и равно \( t \) а движение точки происходит против вращения платформы.
Решение
Предварительно для дальнейшего решения задачи необходимо согласно условию задачи составить расчетные схемы. Изобразим схематично механическую систему: платформу с находящейся на ней материальной точкой, а также оси координат.
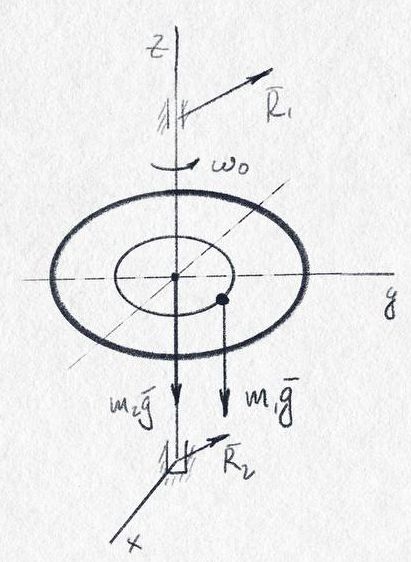
Покажем под действием каких сил находится механическая система. Изобразим возможные направления скоростей платформы и материальной точки.
На механическую систему действуют следующие силы: силы тяжести платформы и точки, а также силы реакции. Моменты
данных сил относительно оси вращения равны нулю, а следовательно, проекция главного момента количеств движения
рассматриваемой механической системы человека останется постоянной, т.е., имеет место закон
сохранения кинетического момента относительно оси вращения:
\( K_{z0}=K_z \).
В начальный момент платформа вместе с точкой вращаются с угловой скоростью \( \omega_0 \), тогда:
\( K_{z0}=I_z \omega_0 + m_1 \omega_0 r^2. \)
В текущий момент платформа продолжает вращение, при движении по ней материальной точки, тогда:
\( K_{z}=I_z \omega + m_1 ( \omega r^2 - ur), \)
тогда:
\( I_z \omega_0 + m_1 \omega_0 r^2=I_z \omega + m_1 ( \omega r^2 - ur), \)
откуда, с учетом \( I_z = \frac{m_2 R^2}{2} \):
\( \omega=\omega_0 + \frac{2 m_1 u r}{m_2 R^2 + 2 m_1 r^2}. \)
Построим график зависимости угловой скорости платформы от перемещения точки:

При построении графика использовались следующие значения:
\(m_1 = 4.0 \:кг \) , \(m_2= 8.0 \:кг\), \(\omega_0=4.0\: c^{-1}\), \(R=8.0\: м\), \(r=4.0 \:м\).

При построении графика использовались следующие значения::
Для первого варианта:
\(m_1 = 2.0 \:кг \) , \(m_2=4.0\:кг\), \(\omega_0=0.0\: c^{-1}\), \(R=4.0\: м\), \(r=2.0 \:м\).
Для второго варианта:
\(m_1 = 4.0 \:кг \) , \(m_2=8.0\:кг\), \(\omega_0=4.0\: c^{-1}\), \(R=8.0\: м\), \(r=4.0 \:м\).
Для третьего варианта:
\(m_1 = 4.0 \:кг \) , \(m_3=8.0\:кг\), \(\omega_0=4.0\: c^{-1}\), \(R=8.0\: м\), \(r=4.0 \:м\).